Emisora
Para Pepperoni he elegido la emisora FlySky FS-i6. A continuación puedes ver la configuración adecuada para el bot.

Traslación
Pepperoni se traslada usando un sistema diferencial de dos ruedas: el motor izquierdo mueve la rueda izquierda y el motor derecho mueve la rueda derecha.
En la emisora, ambos motores se controlan con un solo joystick, el derecho. Mover el joystick hacia arriba hace que el bot avance, hacia abajo que retroceda, hacia la derecha que gire sobre sí mismo en sentido horario y hacia la izquierda que gire sobre sí mismo en sentido antihorario.
Para conseguir este modo de acción es necesario que configures lo siguiente:
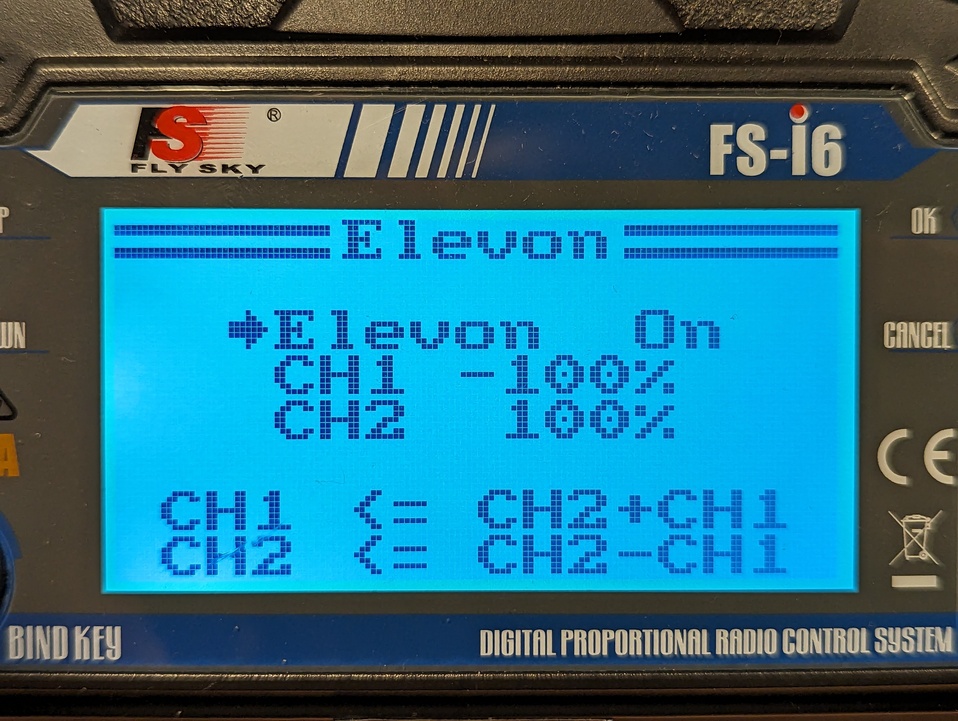
Elevon
La configuración elevon permite mezclar los canales del joystick derecho para controlar ambos motores con él. Configura elevon de la siguiente manera:
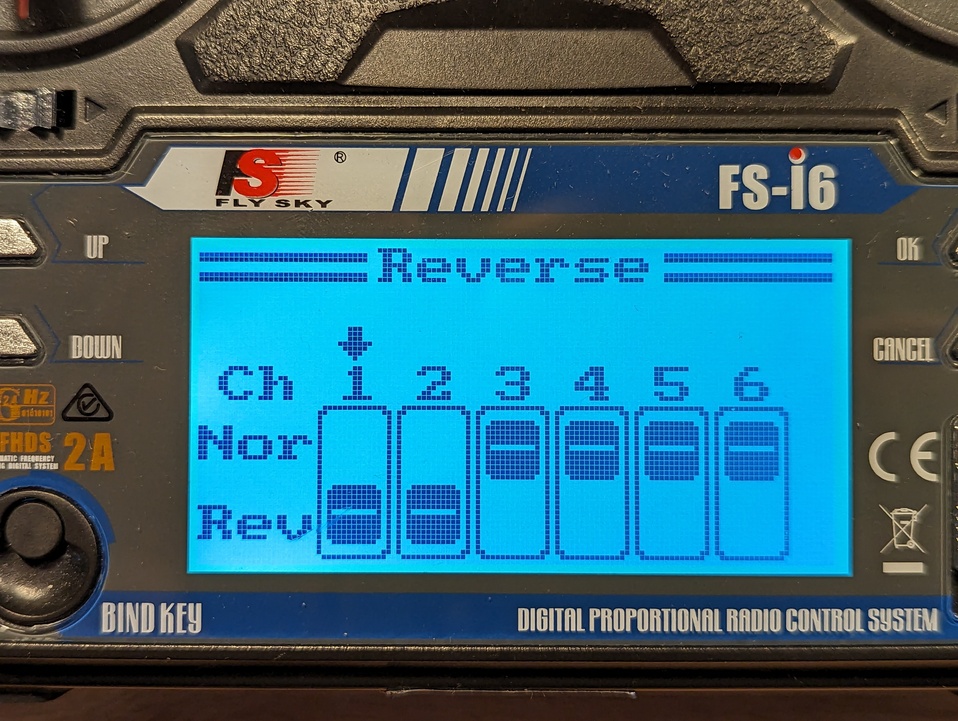
Reverse
Si los motores no giran en el sentido esperado, experimenta con esta configuración o prueba a invertir la posición de los cables de los motores. En mi caso tuve que invertir los canales 1 y 2.
No inviertas el canal 3. Si lo haces, el arma puede comenzar a girar inmediatamente a máxima velocidad estando el joystick en la posición de reposo.
Arma
El arma se controla usando el joystick izquierdo. Cuanto más arriba, más rápido gira.
Por seguridad, he usado el interruptor SWB para bloquear la activación del arma. Si el interruptor se encuentra en la posición 1 el arna no obedece al comando del joystick derecho. Por lo que antes de iniciar el giro del arma hay que cambiar el interruptor a la posición 2.
Para conseguir este bloqueo por interruptor tienes que configurar lo siguiente:
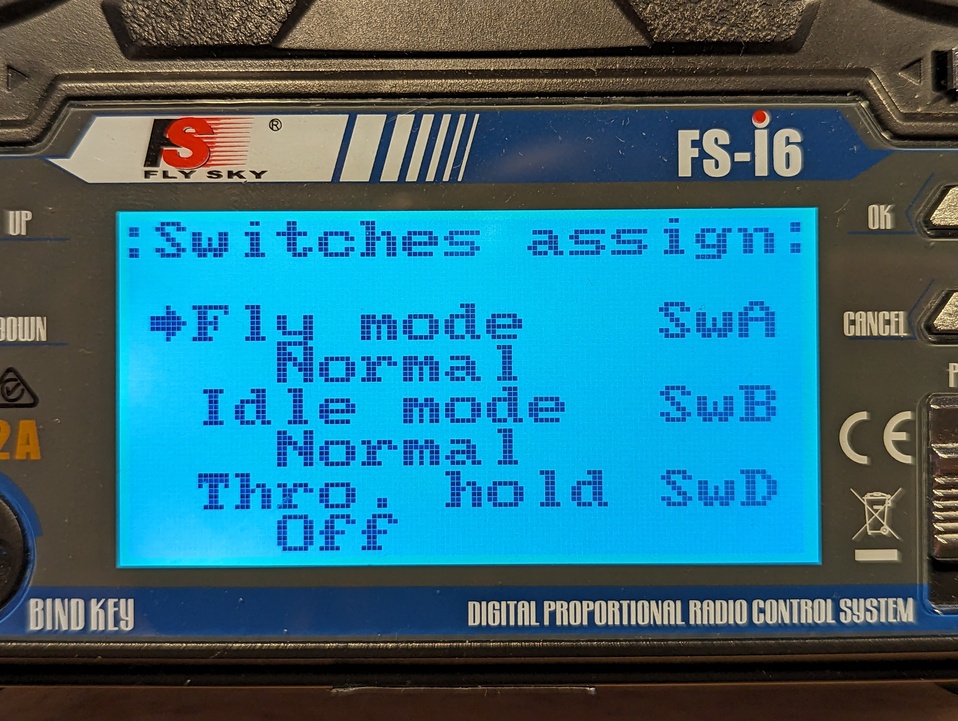
Switches assign
La configuración de swiches permite asignar funcionalidades a los interruptores. En este caso, el único relevante es SWB.
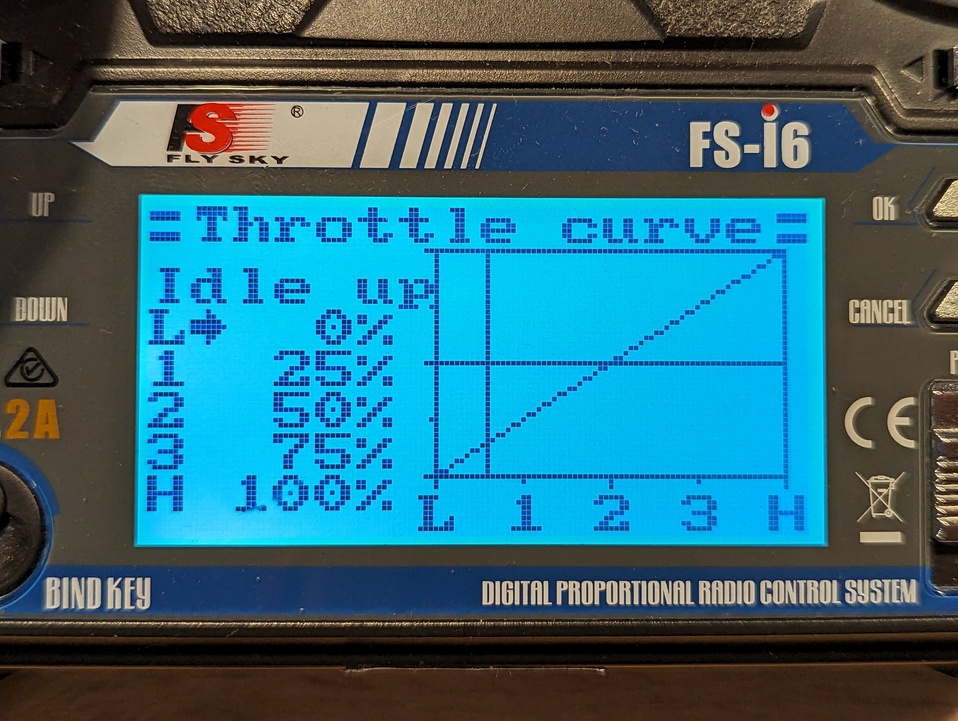
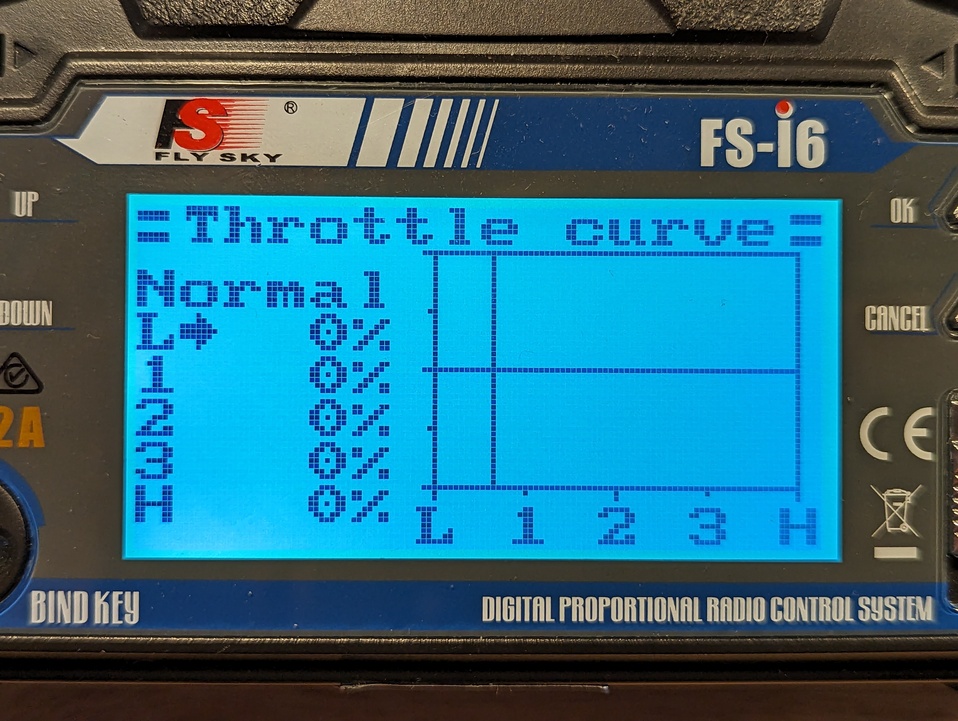
Throttle curve
La configuración de throttle curve permite que el motor del arma responda con curvas distintas en función de la posición del interruptor SWB.
Posición Normal
Posición Idle up