Ensamblaje
Esta guía describe el proceso de ensamblaje de Pepperoni.
Antes de comenzar
Revisa que dispones de todos los materiales descritos en el BOM, de todas las piezas impresas en 3D y de las piezas que conforman el arma. Si usas materiales alternativos puede que necesites improvisar, pero improvisar mola.
Paso a paso
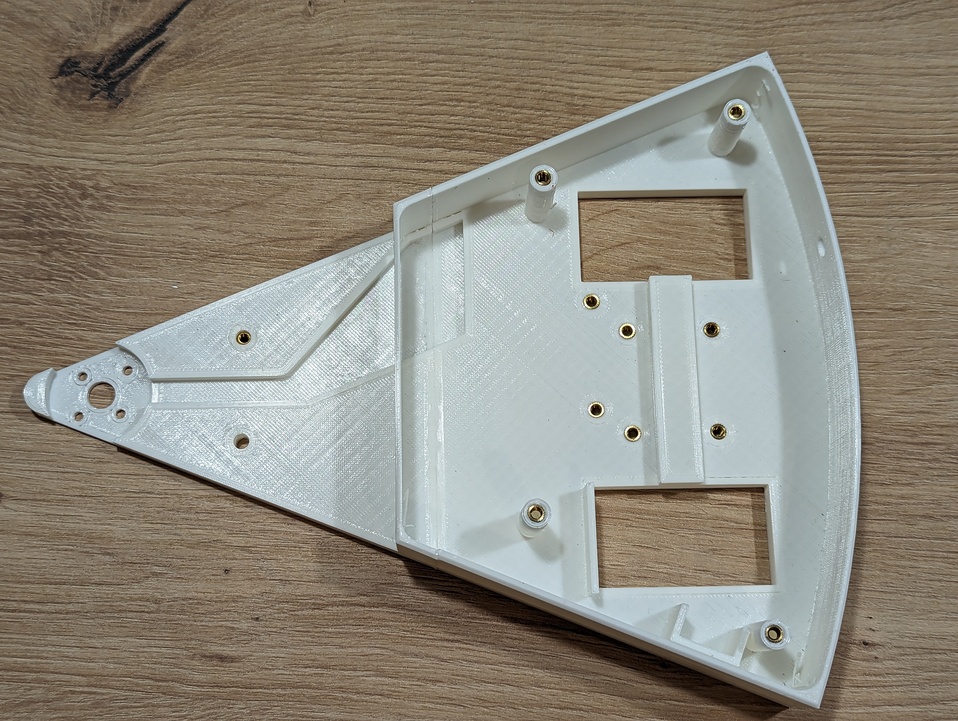
1. Base del chasis
Materiales necesarios
- 1 x Pieza impresa base.
- 11 x Inserto metálico para plástico M3.
Proceso
Introduce los insertos en sus respectivos agujeros. Fíjate en la imagen para localizar su posición.
Para cada inserto:
- Coloca de forma superficial el inserto sobre el agujero.
- Usa un soldador caliente para empujar el inserto dentro del agujero.
No hagas mucha fuerza con el soldador. Los insertos se introducen muy rápidamente una vez alcanzan la temperatura óptima.
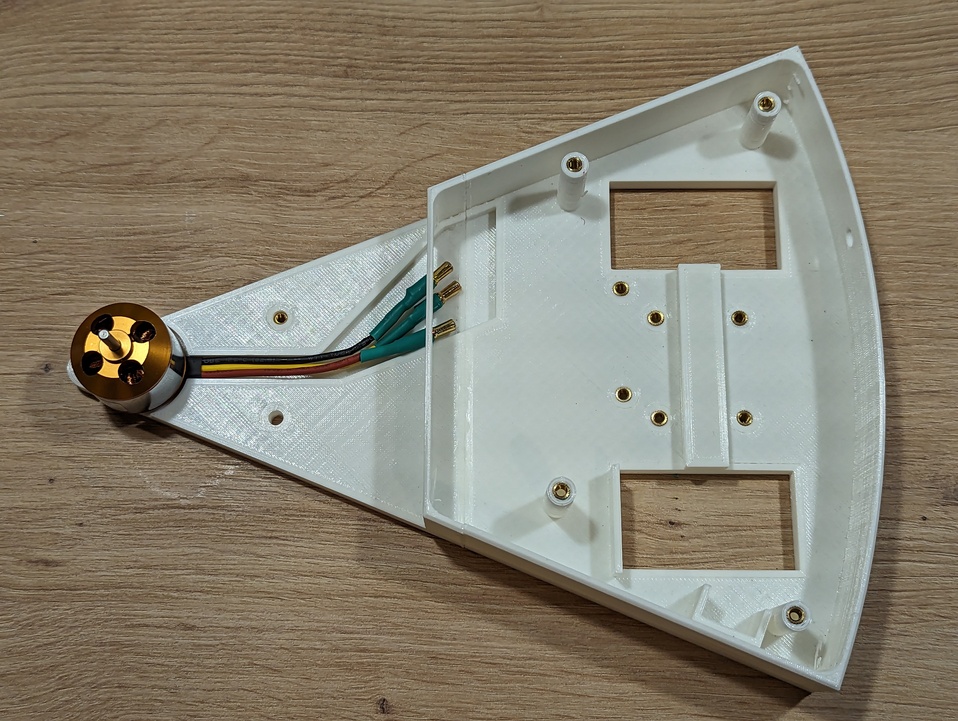
2. Motor del spinner
Materiales necesarios
- Subensamblaje del paso anterior.
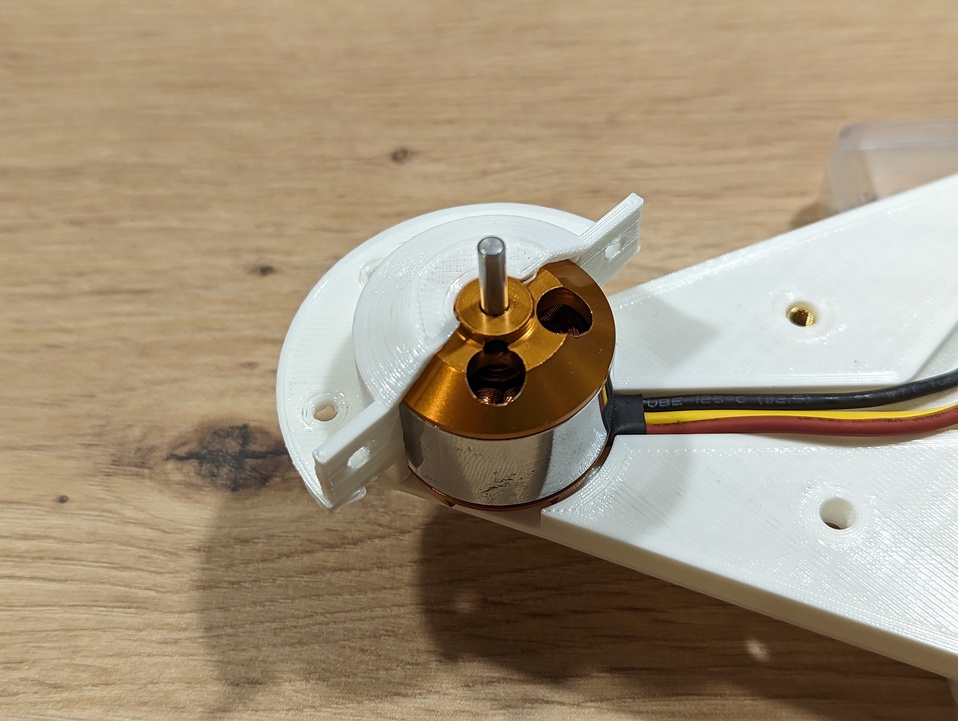
- 1 x Motor brushless.
- 4 x Tornillo M3x4.
Proceso
- Paso 2.1
- Paso 2.2
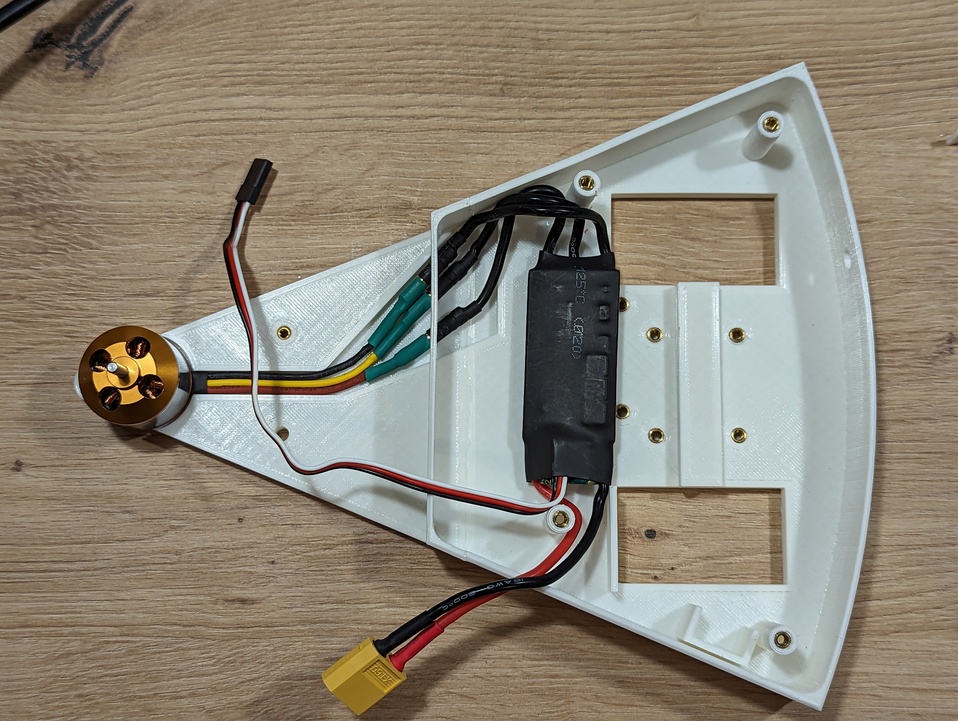
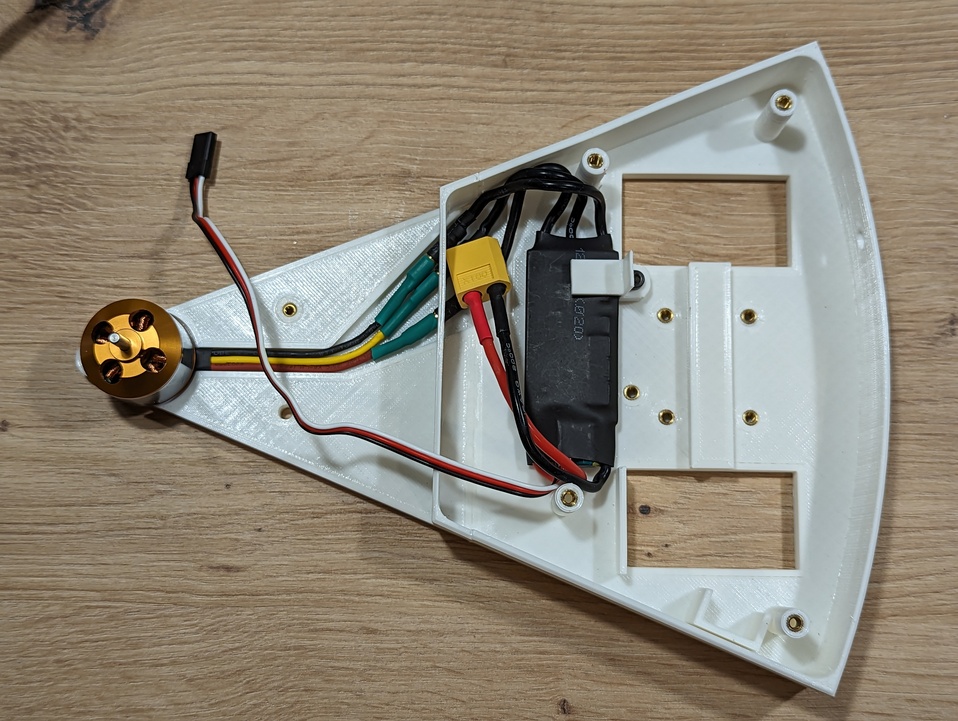
3. ESC del motor del spinner
Materiales necesarios
- Subensamblaje del paso anterior.
- 1 x Pieza impresa pinza ESC.
- 1 x ESC para motor brushless.
- 1 x Tornillo M3x16.
Proceso
- Paso 3.1
- Paso 3.2
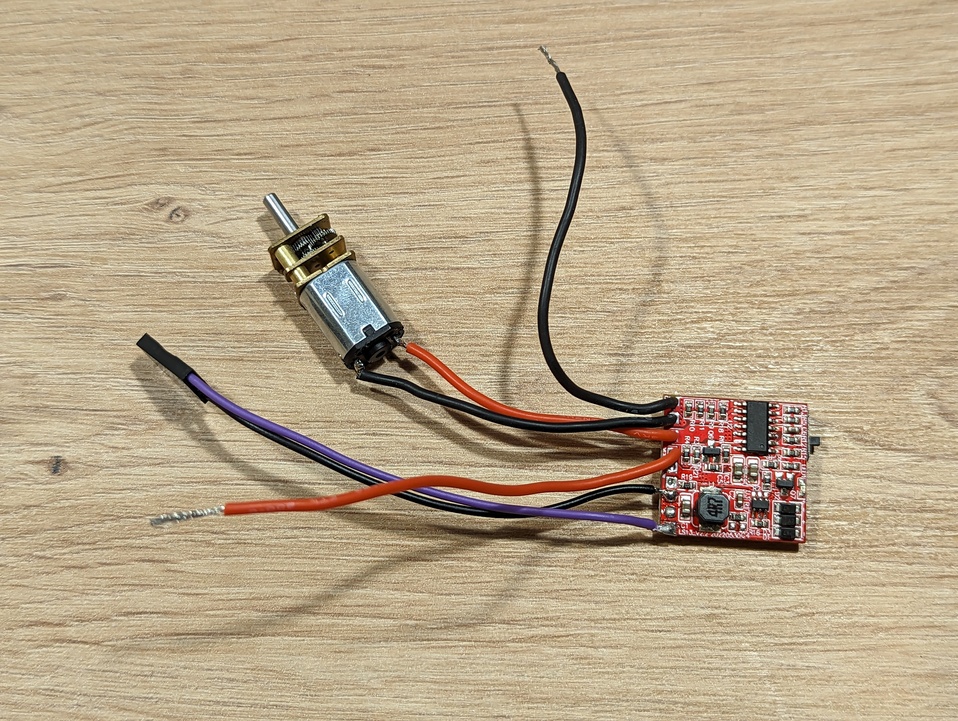
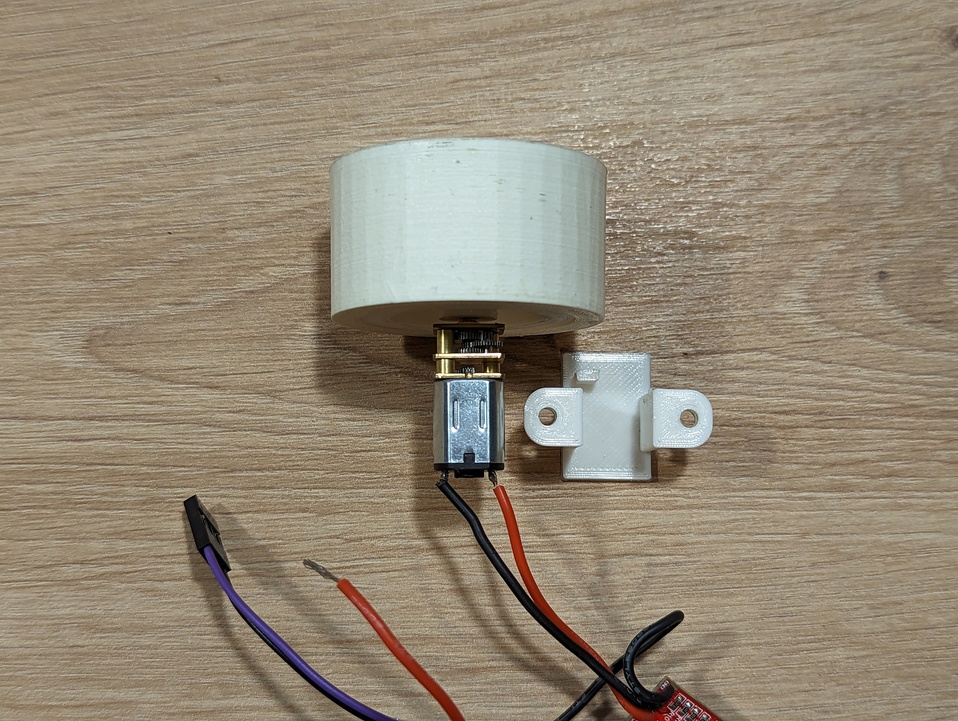
4. ESC y motores DC
Materiales necesarios
- 2 x Motor DC.
- 2 x ESC para motor DC.
Proceso
Para cada motor:
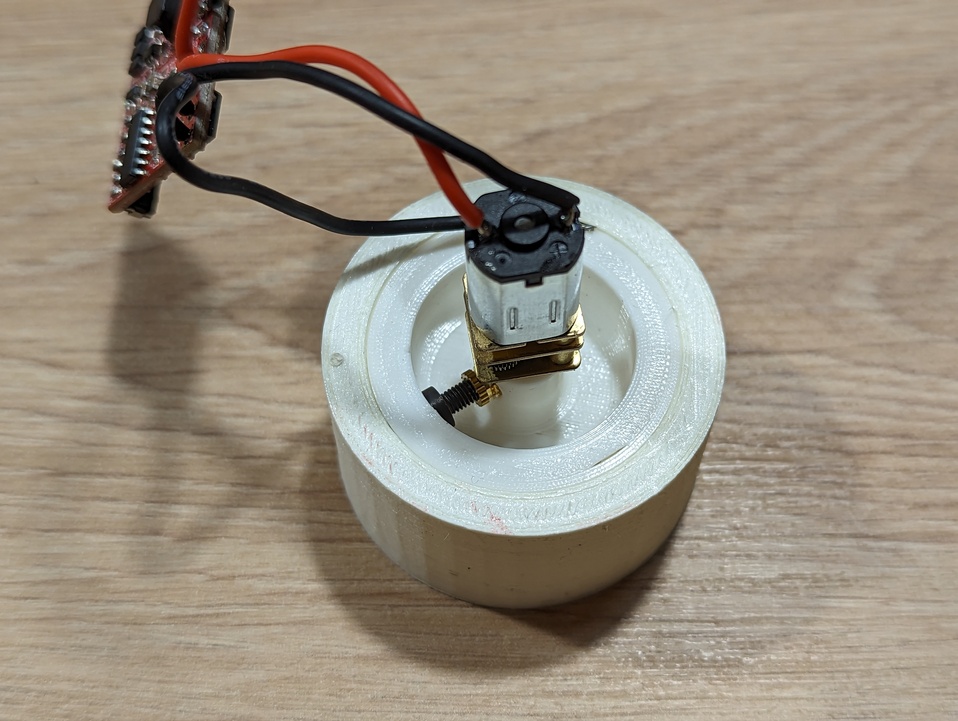
- Conecta mediante cables y soldadura el motor DC con el ESC de corriente continua.
- Quita el cable central de alimentación del conector de tres pines que irá conectado al receptor.
Corta los cables con las siguientes longitudes.
- Motor DC: 50 mm.
- Conector tres pines: 60 mm.
- Cables de alimentación: 60 mm.
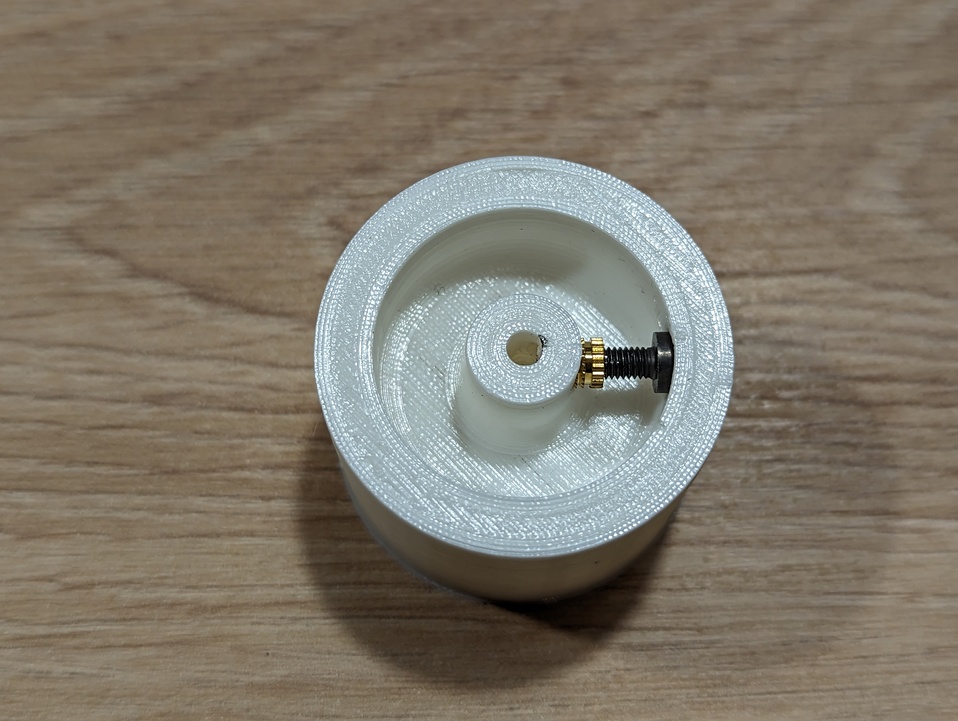
5. Ruedas
Materiales necesarios
- Subensamblaje del paso anterior.
- 2 x Pieza impresa llanta.
- 2 x Pieza impresa neumático.
- 2 x Inserto metálico para plástico M3.
- 2 x Tornillo M3x16.
Proceso
Repite el proceso para cada rueda:
- Paso 5.1
- Paso 5.2
- Paso 5.3
6. Motores en el chasis
Materiales necesarios
- Subensamblaje del paso 3.
- Subensamblaje del paso 5.
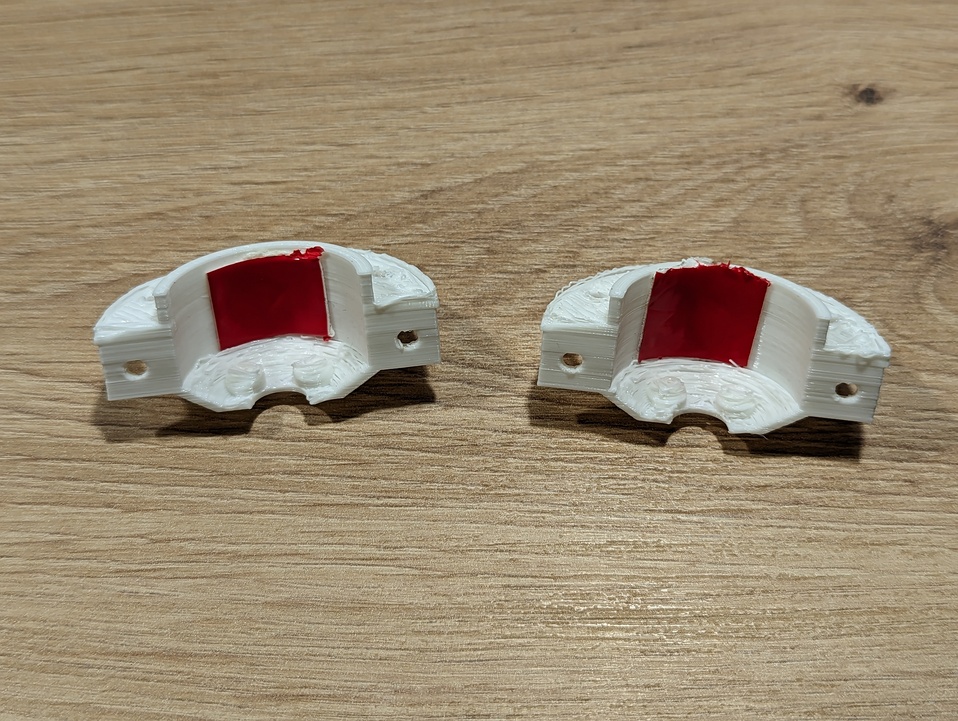
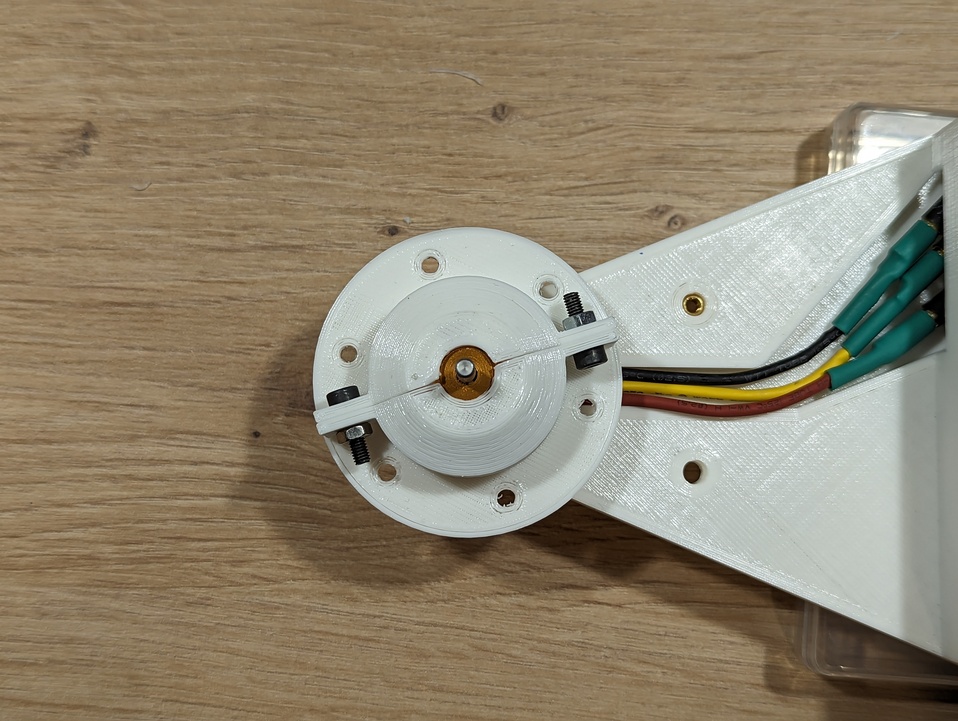
- 2 x Pieza impresa grapa motor DC.
- 2 x Pieza impresa soporte ESC DC.
- 2 x Pieza impresa separador 2mm.
- 4 x Tornillo M3x16.
- 2 x Bridas 100mm.
- 2 x Conector Wago 5 vías.
Proceso
Para cada motor:
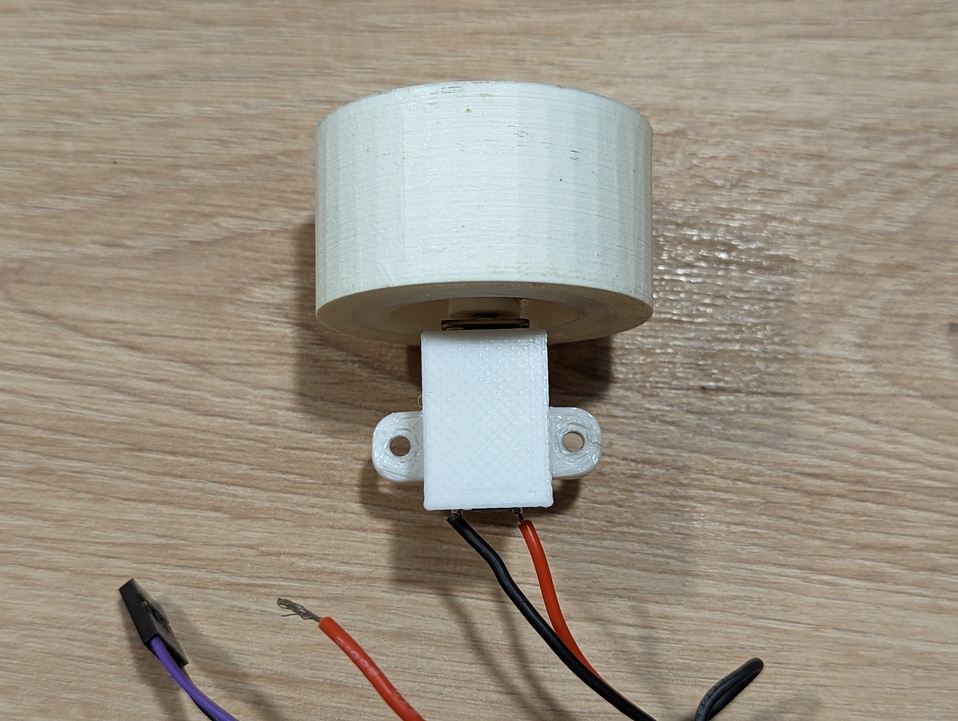
- Paso 6.1
- Paso 6.2
- Paso 6.3
- Paso 6.4
- Paso 6.5
- Paso 6.6
- Paso 6.7

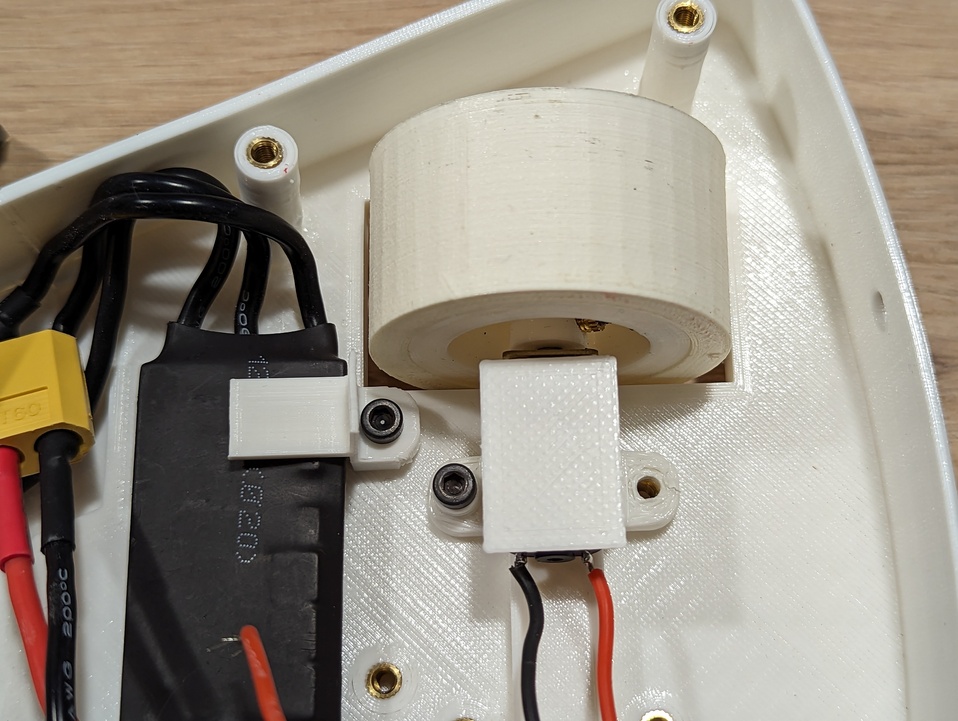
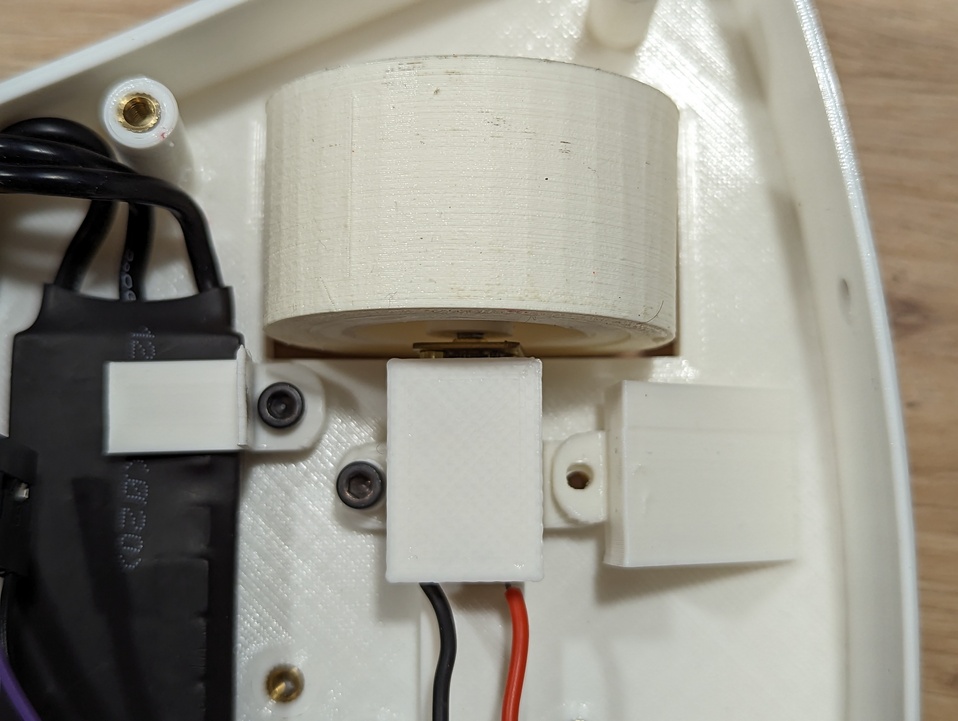
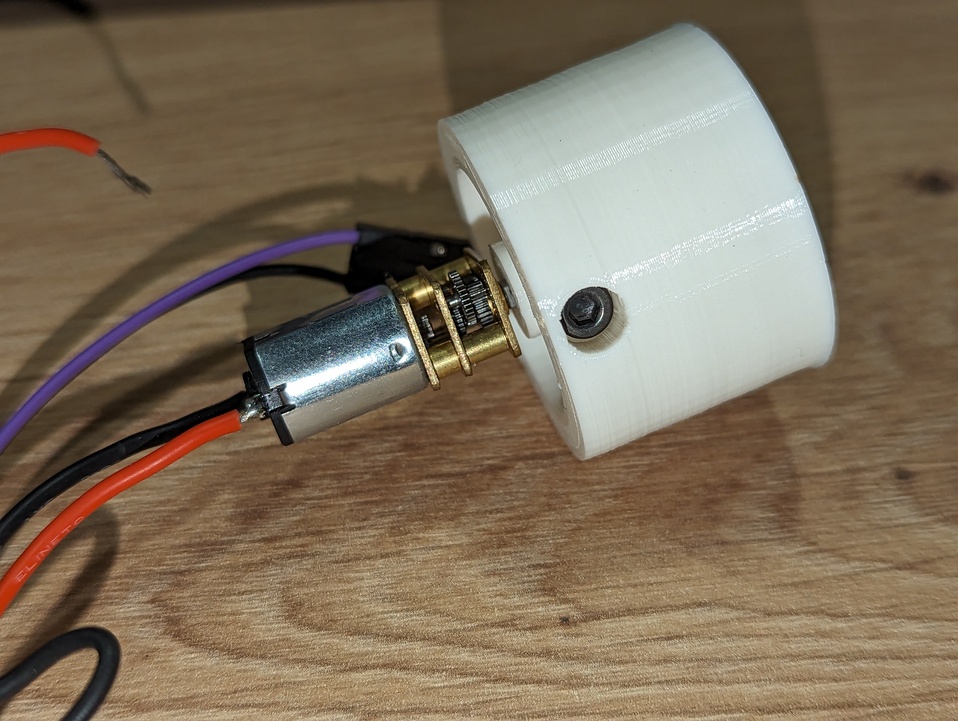
Observa que la pieza impresa grapa motor DC cuenta con una protuberancia que encaja en la reductora del motor.
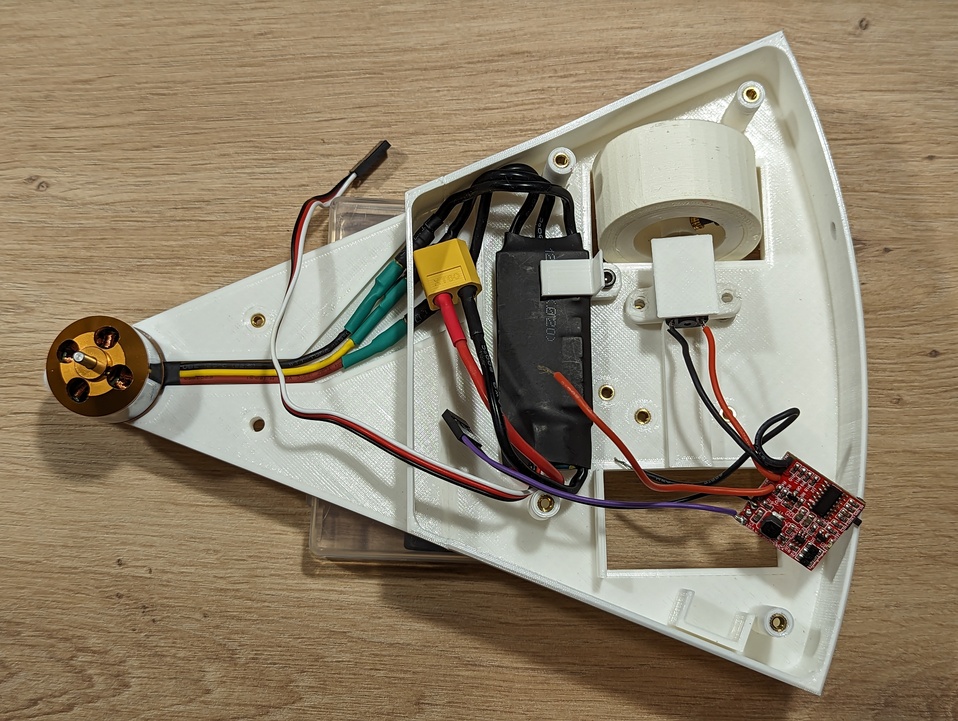
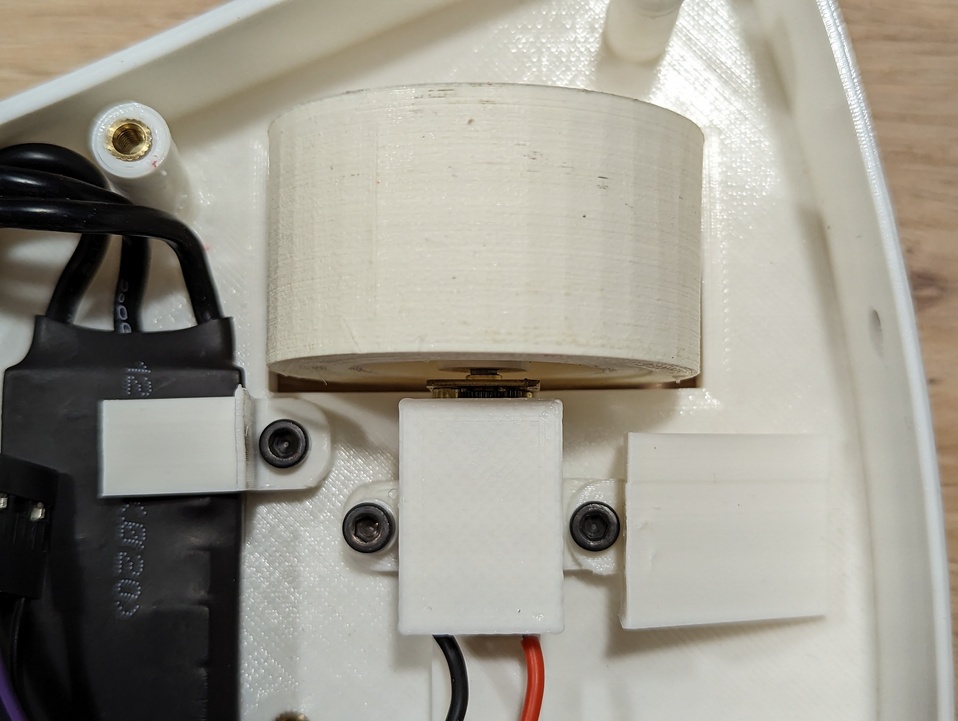
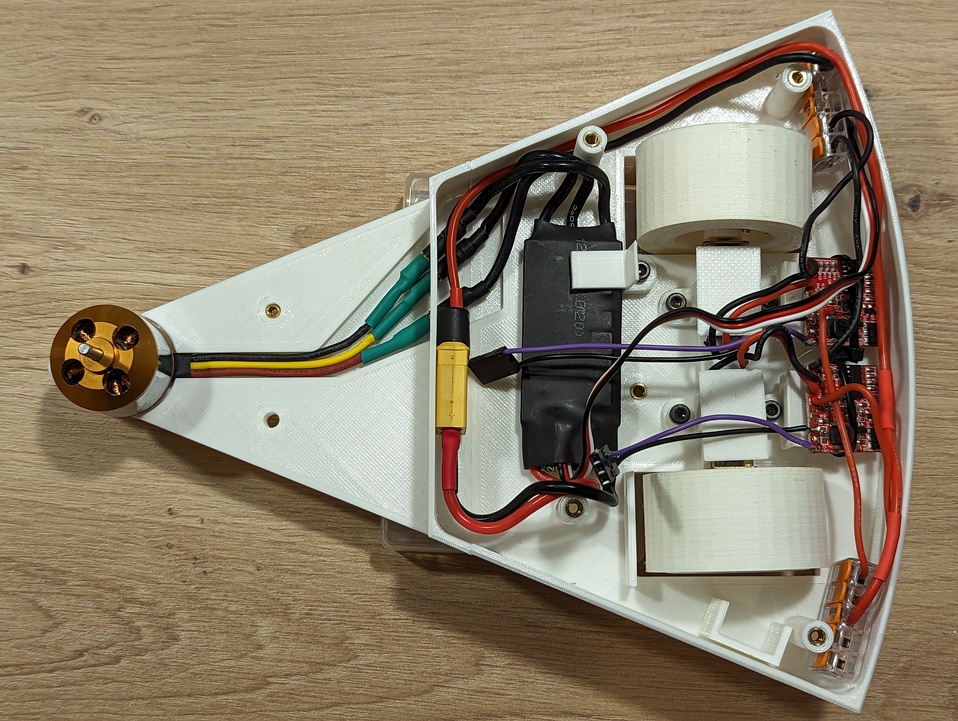
El resultado tras colocar ambos motores debe ser el siguiente:
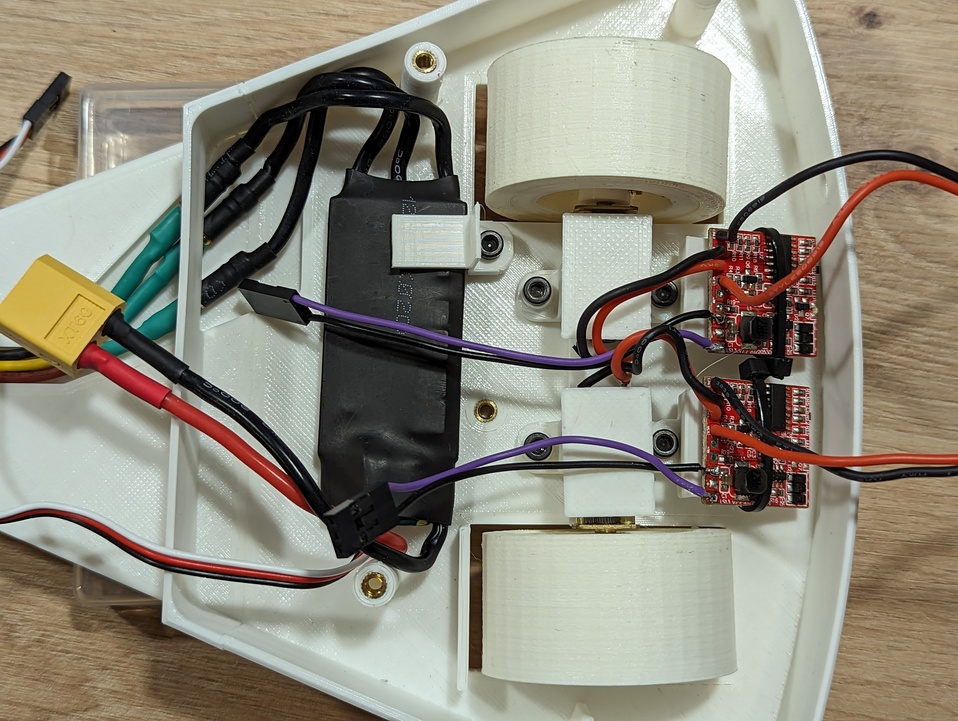
Completa el montaje de los motores en el chasis colocando los dos conectores Wago, uno a cada lado del robot. Observa como el conector de masa se encuentra en el lado derecho del robot (parte superior de la foto).
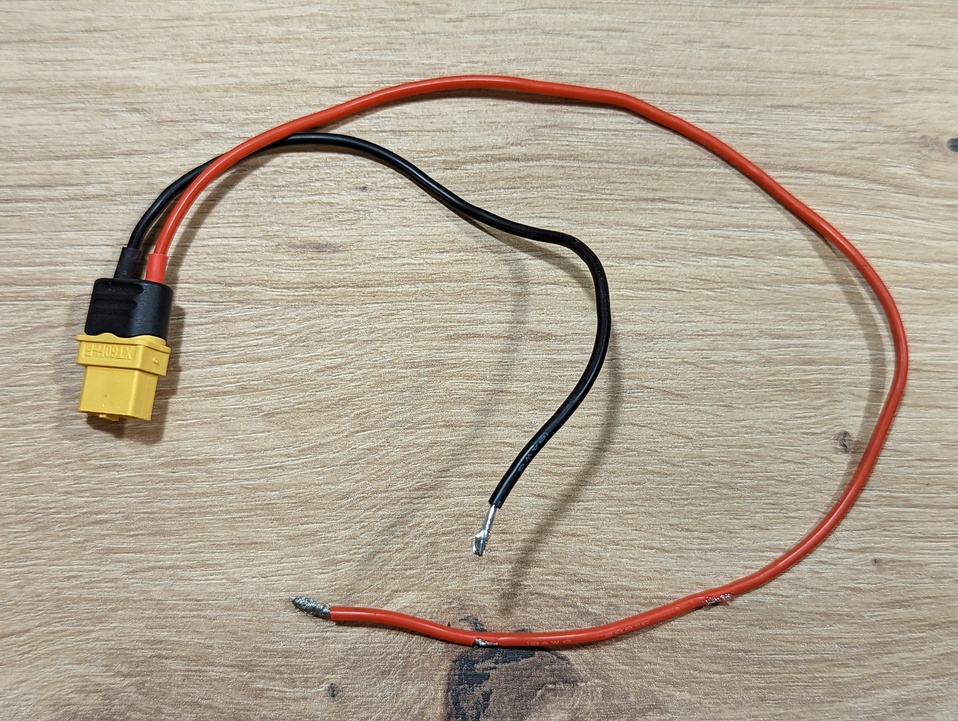
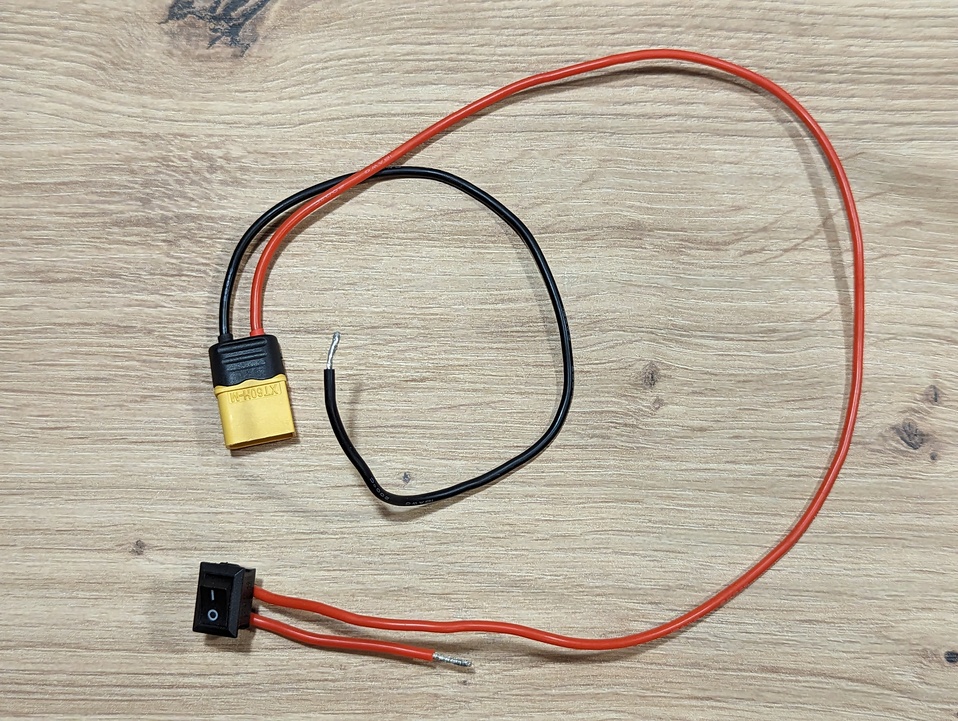
7. Arnés de cableado
Materiales necesarios
- Subensamblaje del paso anterior.
- 1 x Conector XT60 macho.
- 1 x Conector XT60 hembra.
- 1 x Interruptor.
- Cable 1 mm² rojo y negro.
Proceso
- Paso 7.1
- Paso 7.2
- Paso 7.3
- Paso 7.4
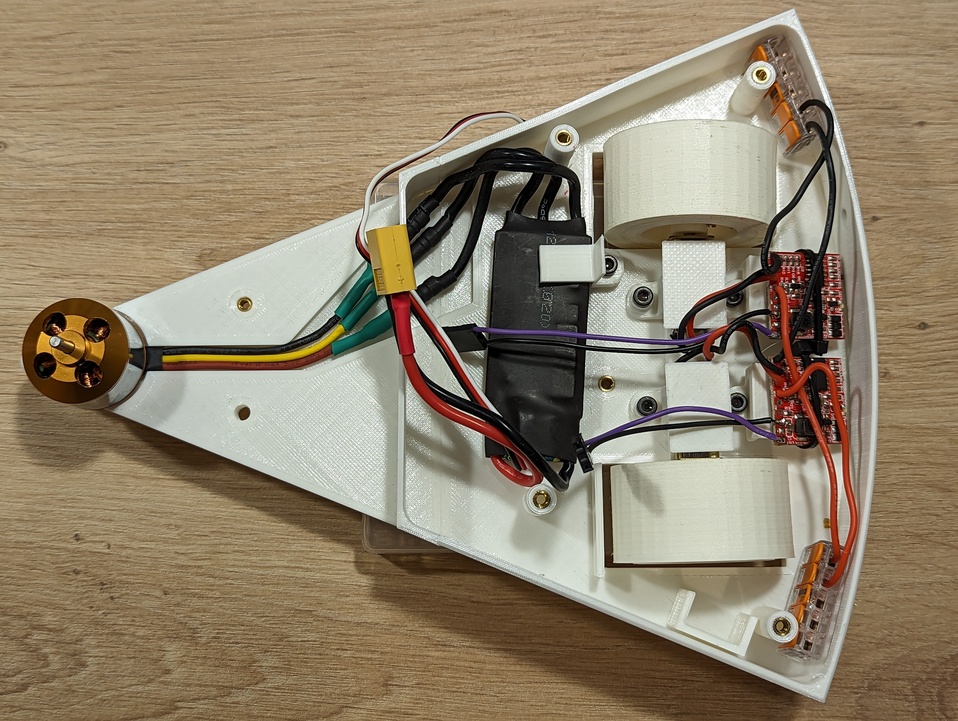
8. Receptor
Materiales necesarios
- Subensamblaje del paso anterior.
- 1 x Receptor RF.
Proceso
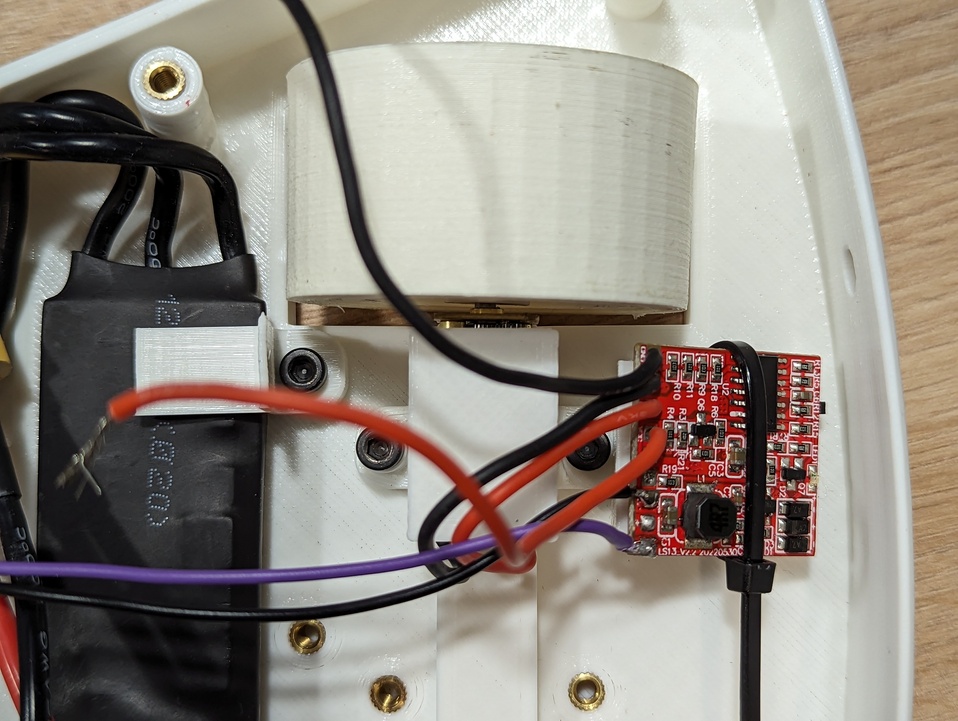
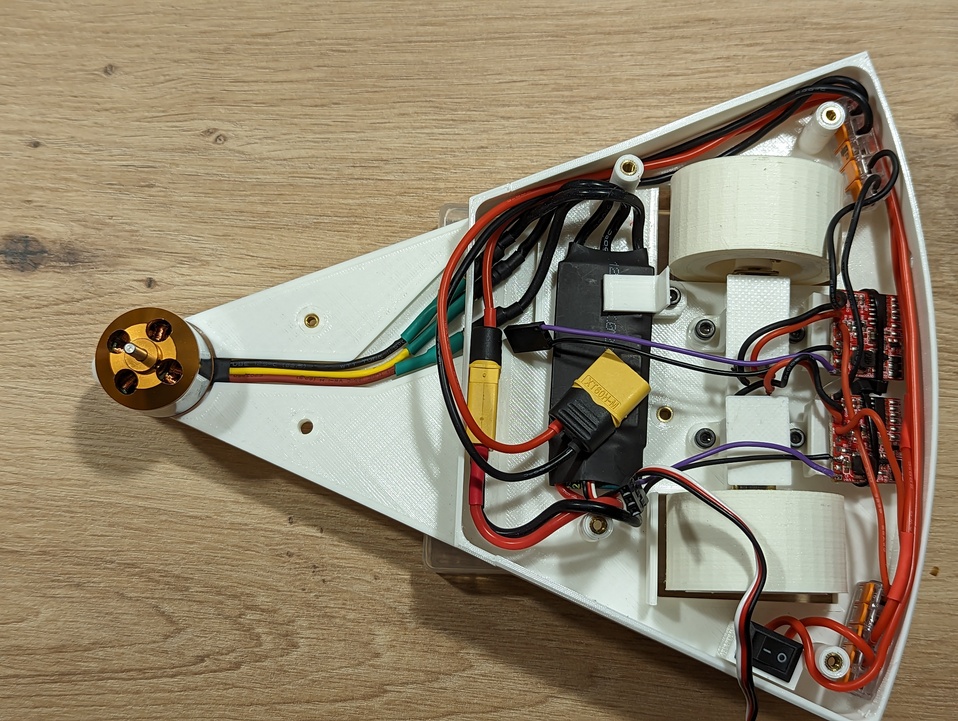
Presta especial atención a la orientación de los conectores.
- Conecta el ESC del motor DC derecho en el canal 1 del receptor.
- Conecta el ESC del motor DC izquierdo en el canal 2 del receptor.
- Conecta el ESC del motor brushless en el canal 3 del receptor.
- Coloca el receptor RF en la parte izquierda del robot tal y como se observa en la imagen.
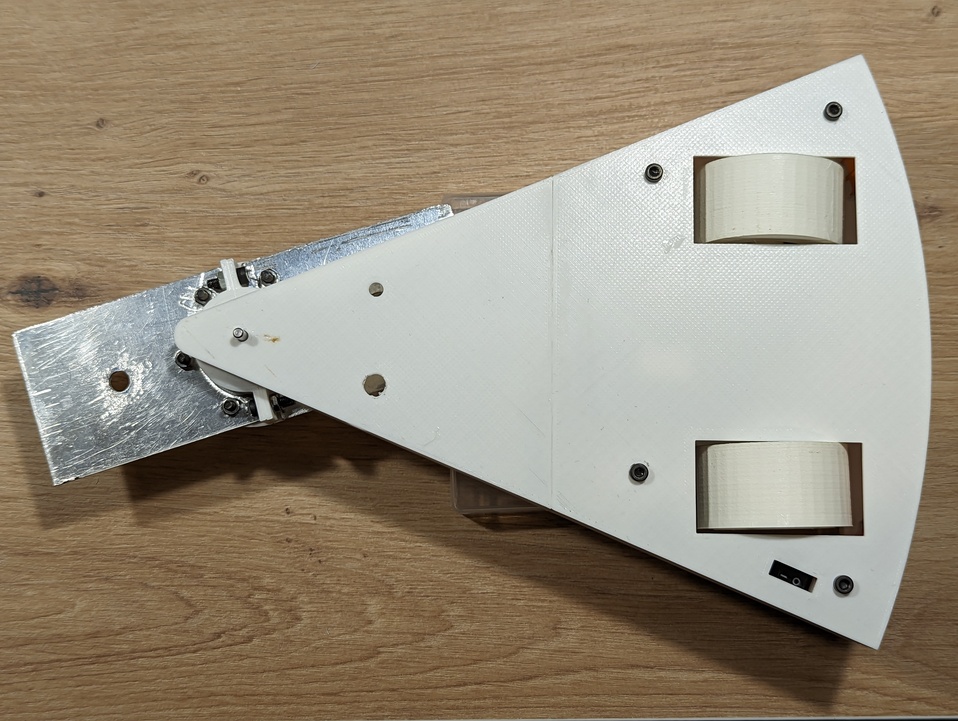
9. Arma
Materiales necesarios
- Subensamblaje del paso anterior.
- 2 x Pieza impresa grapa arma.
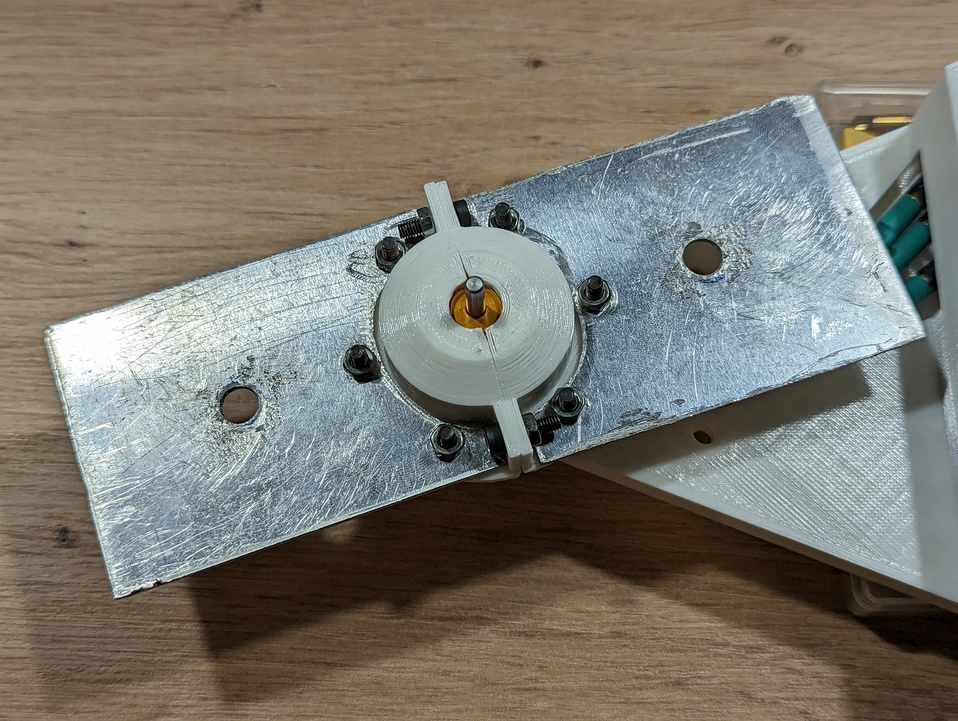
- 2 x Hojas del arma.
- 8 x Tornillos M3x16.
- 8 x Tuerca M3.
- Cinta de doble cara acolchada.
Proceso
- Paso 9.1
- Paso 9.2
- Paso 9.3
- Paso 9.4
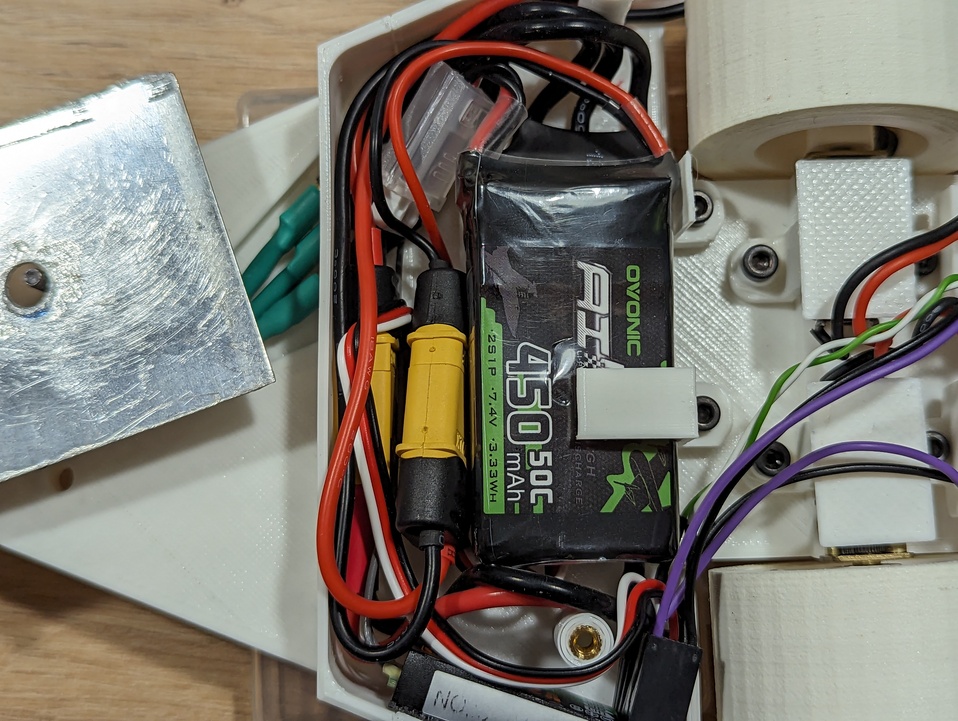
10. Batería
Materiales necesarios
- Subensamblaje del paso anterior.
- 1 x Pieza impresa pinza batería.
- 1 x Batería.
- 1 x Tornillo M3x16.
Proceso
Asegurate de tener bloqueada el arma de forma mecánica antes de conectar la batería. Revisa el documento Bloqueo de arma.
Coloca la batería solo cuando vayas a usar el robot.
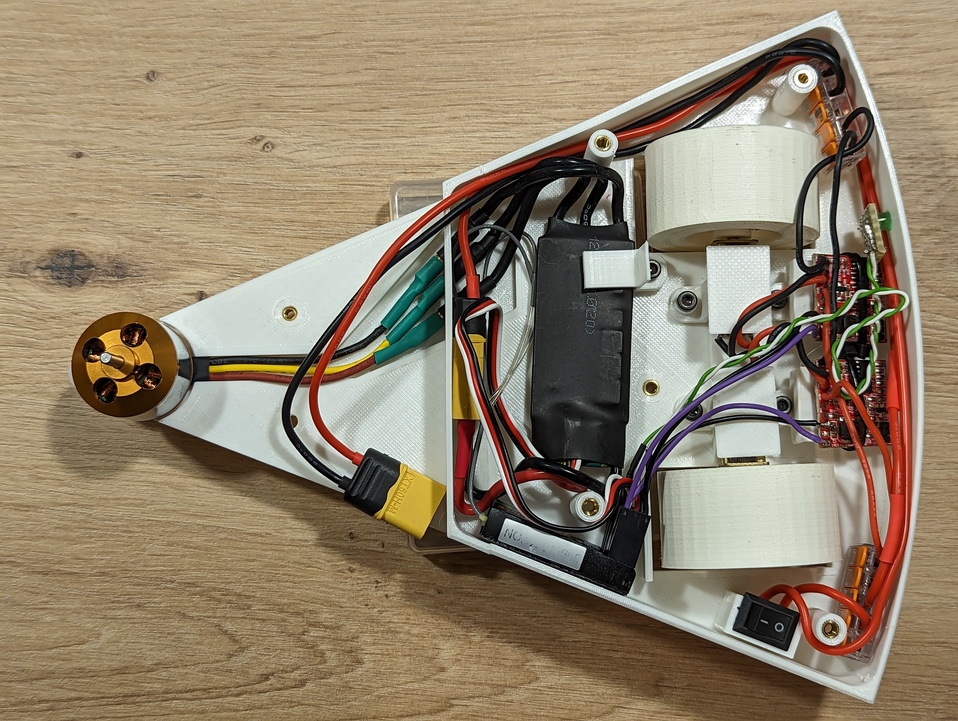
- Conecta la batería al conector XT60 de alimentación.
- Coloca la batería como se observa en la imagen inferior.
- Coloca la pieza pinza batería y fíjala con el tornillo.
11. Tapa
Materiales necesarios
- Subensamblaje del paso anterior.
- 1 x Pieza impresa tapa.
- 4 x Tornillo M3x16.
Proceso
- Coloca y alinea la pieza tapa.
- Coloca los cuatro tornillos para fijar la tapa.